الکتروموتور سروو servo
تعربف سروو موتور:
سروو موتور ها موتورهایی هستند که قابلیت چرخش دقیق در زاویه های 0 تا 360 درجه (البته نه در همه مدل ها ) دارند . این موتور ها اکثرا در ربات هاو جاهایی که نیاز به چرخش دقیق وجود دارد استفاده می شود ( مثل موتور دوربین مدار بسته )
سیستم سروو موتور Servo Motor
سروو برگرفته از یک کلمه یونانی به نام servus که به معنی خدمتکار است.این سیستم نیز که تحت این نام کار می کند را سیستم سروو می گویند.بدین دلیل که می توان گفت یکی از سیستم هایی است که مستقیما به فرامین پاسخ می دهد. سروو موتورها مدت طولانی در اطراف ما بوده اند و در بسیاری از برنامه های کاربردی مورد استفاده قرار گرفته است. آنها در اندازه های کوچک اما با انرژی بسیار کارآمد می باشند. به علت این ویژگی ها، می توان آنها را برای کنترل از راه دور و یا رادیو کنترل ماشین اسباب بازی، روبات ها و هواپیماها استفاده کرد. سروو موتورها همچنین در کاربردهای صنعتی، رباتیک، خط تولید، داروسازی و خدمات مواد غذایی استفاده می شود. اما سروو موتورها چگونه کار می کنند؟
چه چیز در داخل سروو وجود دارد؟
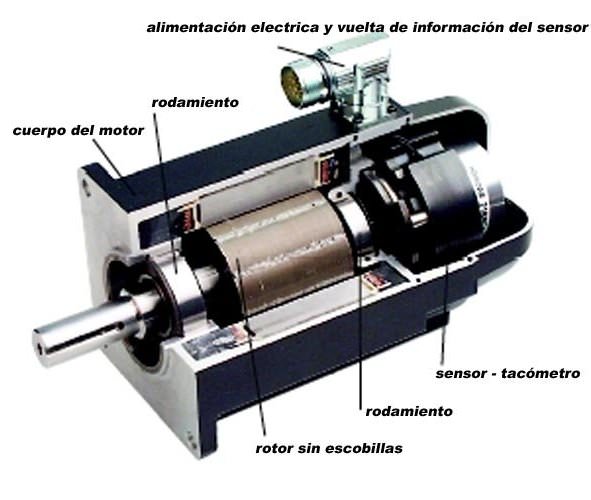
برای اینکه به طور کامل درک کنید سروو چگونه کار می کند، نیاز است که نگاهی به داخل موتور بیاندازید . در داخل مجموعه بسیار ساده: پتانسیومتر، یک موتور DC کوچک، و یک مدار کنترل وجود دارد. این موتور توسط چرخ دنده به چرخ کنترل وصل شده است. همانطور که موتور می چرخد، مقاومت پتانسیومتر تغییر می کند ، بنابراین مدار کنترل می تواند با دقت درست تنظیم کند که چقدر جنبش وجود دارد و در کدام جهت است.
سرو موتور یک دستگاه کوچکی است که یک محور خروجی دارد. این محور قادر است تا در یک موقعیت و زاویه ای خاص با ارسال سیگنال قرار گیرد. در واقع چگونگی حرکت و موقعیت های زاویه ای این محور خروجی توسط دسته ای از سیگنالها که برای سیم کنترل آن تعریف می شود کنترل می شود. برای طول مدت زمانیکه یک سیگنال فعال بوده و یک پالس بر روی خط ورودی آن قرار دارد این محور خروجی در موقعیت خاص زاویه ای که مختص آن سیگنال است قرار می گیرد و با تغییر سیگنال موقعیت زاویه ای تغییر می کند.
چگونه سروو کنترل شده است؟
سیستم سروو را نمی توان تنها عنصری دانست که کارش کنترل سرعت و یا موقعیت تجهیزات مکانیکی است. علاوه بر عناصر ساده مکانیکی سیستم سروو هم اکنون به یک کنترل کننده اصلی برای موقعیت یابی و کنترل سرعت تبدیل شده است.سیستم سروو پالسهایی مثبت را با مقادیر قابل توجهی از این پالسها ارسال می نماید که این پالسها را در اصطلاح پالس فرمان می گویند.
انواع سروو موتورها Servo Motor
دو نوع سرو موتور وجود دارد – AC و DC. سروو AC بیشتر برای سرعت بالا مناسب است و همچنین زمان پاسخگویی سریعتر و دارای کنترل شتاب و کاهش آن است و در ماشین آلات صنعتی مورد استفاده قرار می گیرد.سرووهای DC برای سرعت های بالا طراحی نشده و معمولا برای برنامه های کاربردی کوچک مناسب است. به طور کلی، موتور DC ارزان تر از همتای خود AC است. این سرو موتور که به طور خاص برای چرخش مداوم ساخته شده است، و یک راه آسان برای به حرکت درآوردن رباتتان می باشد.
کاربردهای سروو موتور Servo Motor
،آسانسورها CNC در صنایع روباتیک وتولیدات صنعتی مانند موتورهای کنترل کننده هواپیماها ، خطوط صنعتی تولید،ماشینهای و… کاربرد وسیعی دارند.
مزایای سروو موتور servo Motor
-تنظیمات مختلف بار از قبیل اینرسی بار ، بهره سرعت و سایر پارامترها بصورت خودکار
-عملکرد بدون لرزش در حال توقف به دلیل سیستم کنترل پیشرفته درایو
-امکان ارتباط با تجهیزات جانبی برای مثال با کنترلر یا رابط انسان ماشین از طریق پورت
-تنظیم پارامترها و نمایش وضعیت بررسی درایو
-کنترل موقعیت ، سرعت و گشتاور با یک درایو
-عملکرد بدون لرزش در حال توقف به دلیل سیستم کنترل پیشرفته درایو
-استفاده از انکودر های مطلق و تشخیص موقعیت جاری موتور در هر لحظه
-قابلیت انتخاب شیب راه اندازی و توقف به صورت خطی
-امکان تغییر جهت گردش موتور بدون نیاز به تعویض در سیم بندی موتور
-انتخاب نسبت گیربکسهای الکترونیکی مختلف از طریق ورودیها
– قابلیت جبران لقی ناشی از خطای قطعات مکانیکی
——————————————————————————————————-
سروو یک موتور گیربکس است که از محور خروجی آن فیدبک گرفته شده است. یعنی می توان موقعیت آنرا نعیین کرد. البته این کار را خود سروو انجام می دهد. تنها کاری که ما باید انجام دهیم این است که به آن پالس های مورد نیاز را به صورت پشت سر هم وارد کنیم.


سروو ها معمولا سه تا سیم دارند.
یک سیم سیم vcc است. این سیم باید به مثبت ۴.۸ تا ۶ ولت وصل شود. سیم دیگه سیم gnd است که باید به صفر ولت وصل شود.
سیم دیگر که معمولا از همه سیم ها کمتر نیز است سیم دیتا است که باید پالس ها به آن وارد شود.
این پالس ها باید بین ۱.۲۵ تا ۱.۷۵ میکرو ثانیه یک باشد و حدود ۱۵ میلی ثانیه صفر.
اگر پالس های با طول یک ۱.۵ میلی ثانیه یک به سروو اعمال کنیم هد آن درست در وسط می ایستد.
پالس ها باید به صورت متوالی به سروو اعمال شود وگرنه سروو خاموش می شود.